Feeling the Force: A Nuanced Physics-based Traversability Sensor for Navigation in Unstructured Vegetation
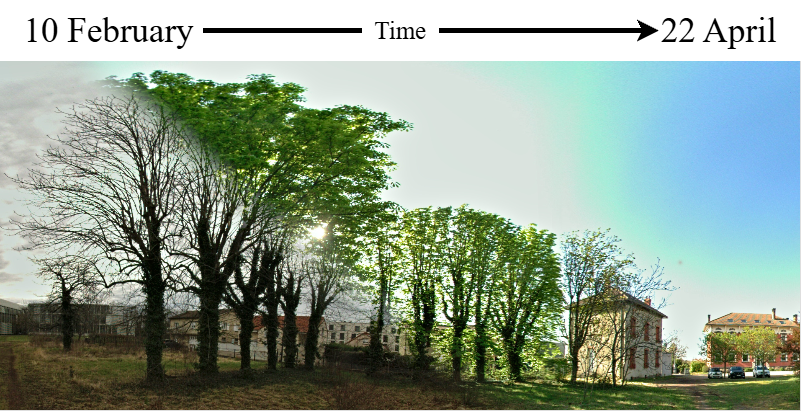
When and Where Localization Fails: An Analysis of the Iterative Closest Point in Evolving Environment