Energy Prediction on Sloping Ground for Quadruped Robots
Energy management is a fundamental challenge for legged robots in outdoor environments. This work investigates how terrain slope and heading orientation influence the energetic cost of quadruped locomotion. We introduce a simple energy model that relies solely on standard onboard sensors and is applicable in previously unexplored environments.
Methodology and Setup
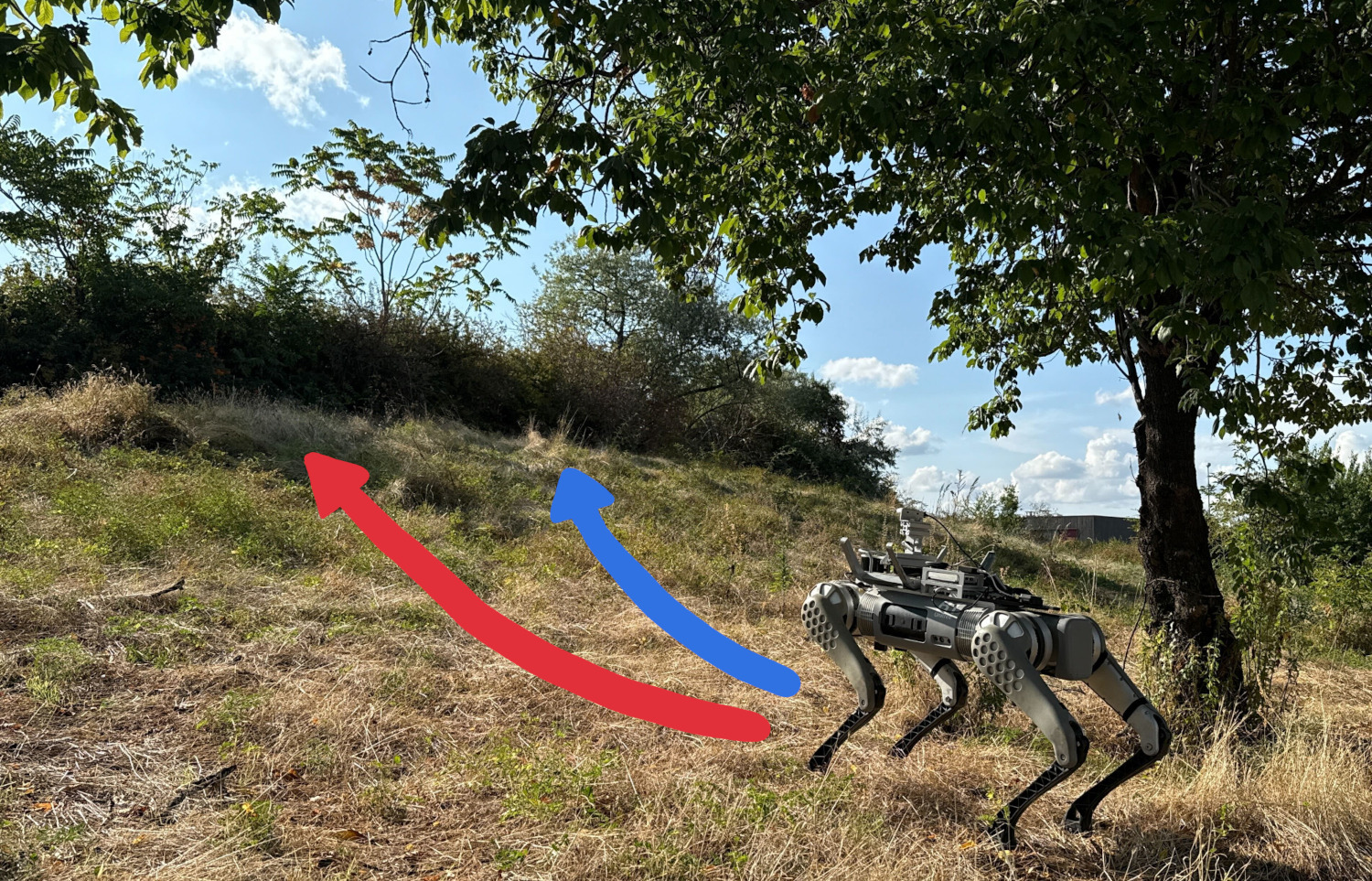
We used a Unitree B1 quadruped with standard sensors (battery monitor, IMU, odometry) on outdoor slopes ranging from 5° to 20°. The robot traveled at constant speed (0.3 m/s) along straight segments to minimize confounding effects.
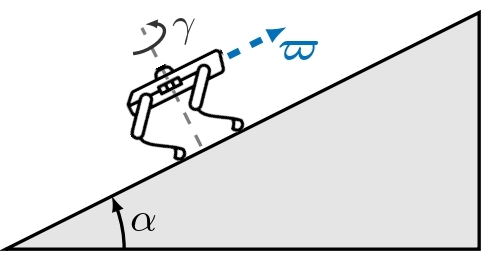
The coordinate system establishes α as the slope angle and γ as the robot’s heading relative to the slope direction. Energy is modeled as the integral of instantaneous power over the trajectory.
Key Results
Energy Superposition Validation
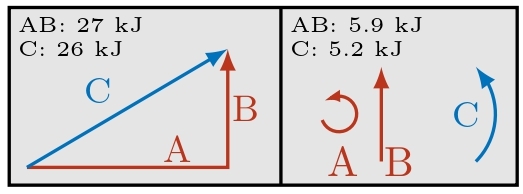
The model treats energy as additive across path segments, validated through composite path experiments.
Power-Slope Relationships
Field experiments reveal clear linear trends with opposite behaviors for uphill versus downhill motion.

Measured power as a function of slope angle shows: power increases linearly when climbing, decreases moderately when descending, and lateral motion consistently requires more energy than forward motion.
Key Findings
- Linear power-slope relationships with directional asymmetry
- Energy additivity across segments (4-13% accuracy)
- Sensor-only approach using standard onboard systems
- Directional anisotropy favoring forward over lateral motion
Applications
This energy model enables energy-aware path planning for agricultural robots, mission duration prediction, and optimization strategies that exploit directional energy asymmetries.
| Downloads: Full Paper (PDF) | BibTeX |
Ounally, M., Pierre, C., & Laconte, J. (2025). Energy Prediction on Sloping Ground for Quadruped Robots. 3D-Advice: Advanced 3D Vision for Complex Environments Workshop.